Специалисты Канадского космического агентства (CSA) представили отчет по программе Next-Generation Canadarm (Новое поколение Canadarm). Проект предполагает создание четырех роботов для обслуживания космических станций.
"Страны мира расширяют границы в освоении космоса для достижения таких пунктов назначения, как Луна или Марс. Канада планирует развивать робототехнику, которая будет иметь решающее значение в будущих миссиях, от космических телескопов до транспортных средств, которые могут увезти людей за орбиту Земли. Обширная флотилия спутников вблизи Земли, обслуживающая нас ежедневно также может потребовать поддержки для технического обслуживания или заправки", - сообщается на сайте CSA.
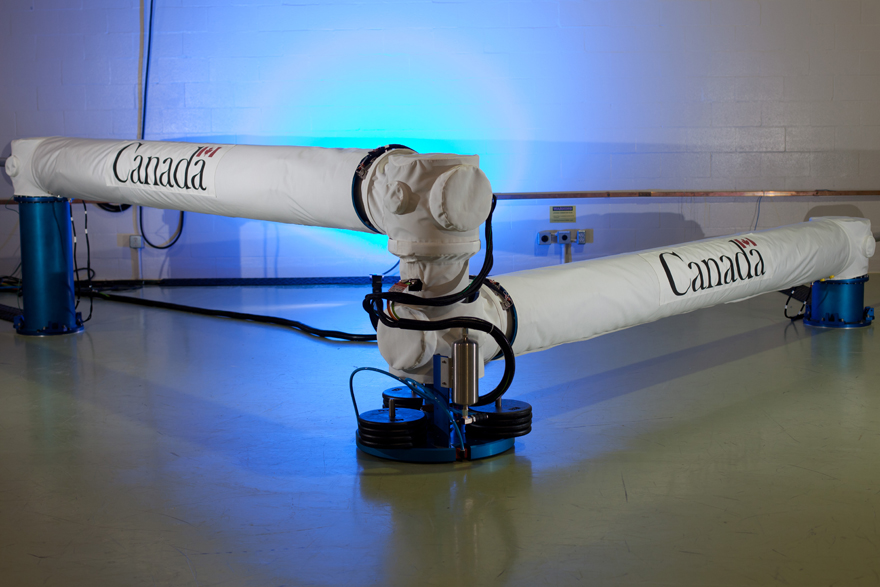
Новая версия руки-манипулятора Canadarm. Фото: CSA
Первый робот - это рука-манипулятор. Она очень похожа на Canadarm 2, которая установлена на борту МКС. В развернутом виде манипулятор имеет длину в 15 метров, однако в отличии от предыдущей версии новая рука намного легче. Также она гораздо компактнее: телескопическая схема позволяет конструкции складываться до объемов минивэна. Данный инструмент пригодится для захвата и стыковки больших космических аппаратов, а также для дозаправки.
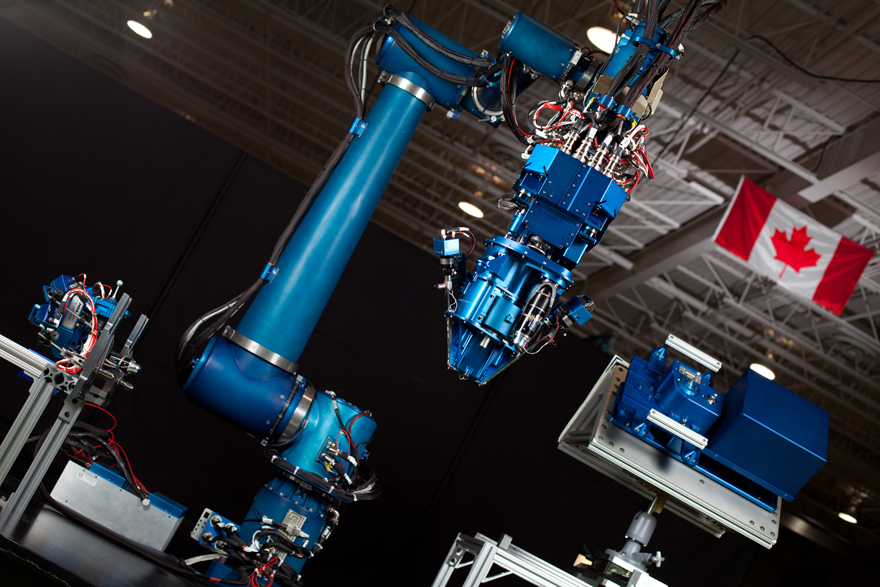
Уменьшенная версия. Фото: CSA
Второй робот - это также рука-манипулятор, но только уменьшенная версия. Данный прототип основан на манипуляторе Декстер, который также расположен на МКС. Новый инструмент имеет длину 2,58 метра. Оснащенный передовой электроникой и программным обеспечением манипулятор может выполнять целый ряд различных задач: открытие/закрытие топливных клапанов, передача топлива между аппаратами, удаление защитных покрытий, резка проводов и т. д. Также как и Декстер, рука-манипулятор сможет обслуживать любые области космических аппаратов: она будет доставляться до них с помощью большого манипулятора Canadarm.
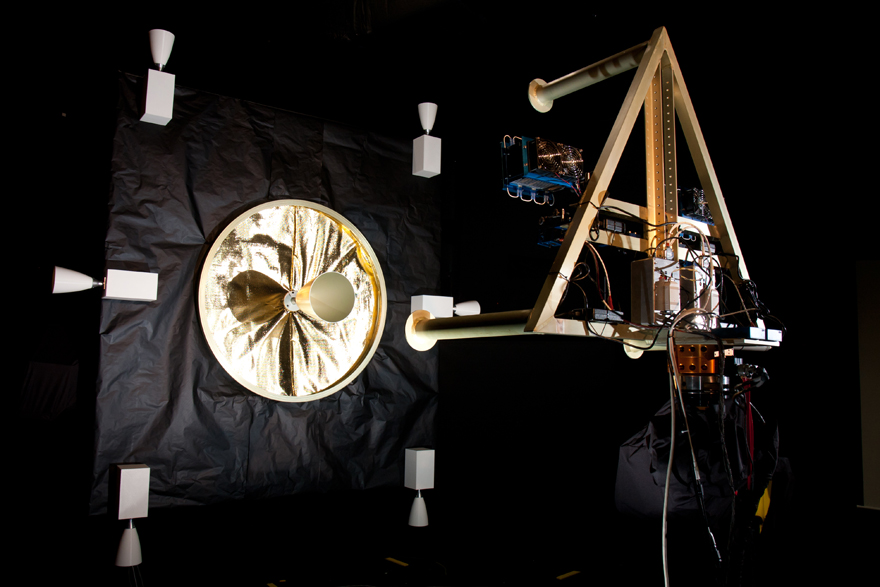
Система сближение космических аппаратов. Фото: CSA
Третий робот - это система сближения космических аппаратов. На данный момент робот находится в разработке, а на фотографии выше - тестовый стенд, представляющий из себя две системы, которые имитируют операции, включающие ремонт искусственных спутников. Ремонт будет осуществляться между космическими аппаратами, расположенными всего в нескольких метрах друг от друга. Тестовый стенд обеспечивает реальные условия, включающие освещение, размеры, расположение камер и др.

Полуавтономная система стыковки. Фото: CSA
И наконец, четвертый является полуавтономной системы стыковки, которая также находится в стадии разработки. Система необходима для проведения стыковки в автоматическом режиме. Робот оснащен различными датчиками, которые позволят обеспечить точную стыковку между двумя космическими аппаратами.


")
")
")

 0
0